pendulum
Status: On-Hold
This is an attempt to design and build an inverted pendulum stabilized by reaction wheels. This project was a good opportunity to learn about some topics that I had recently heard about, specifically quaternions and optimal control. Along the way I learned how to use OnShape to design the reaction wheels and even generated a CAM profile to have the wheels CNC’d at a friend’s shop. Schematics and a PCB were designed and even ordered for this but the BOM and assembly cost was too expensive given that I wasn’t able to get reviews of the design.
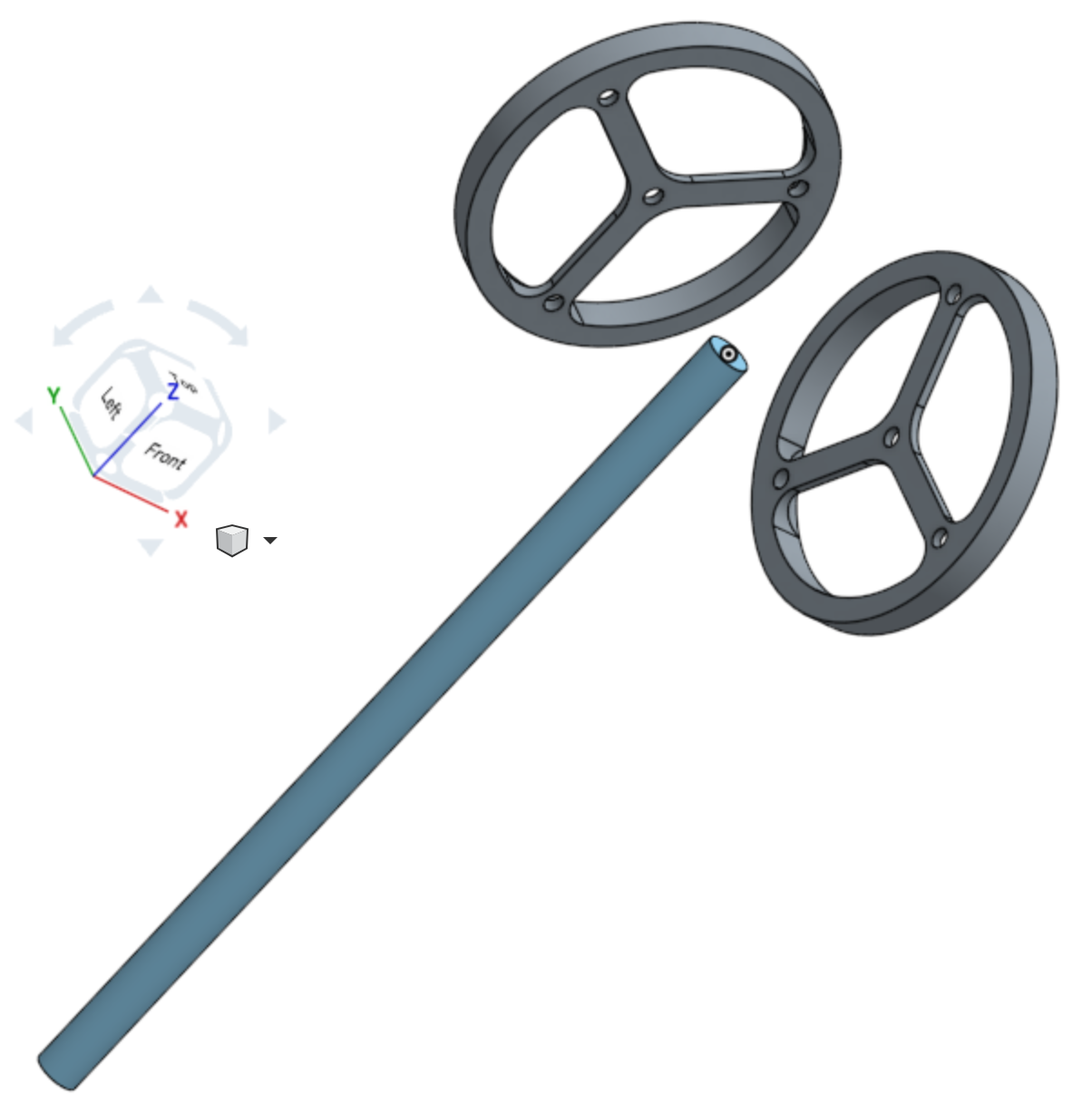
Sensors on the top of the pendulum detect that the pendulum has fallen and transfers momentum from the falling pendulum to the wheels attached.
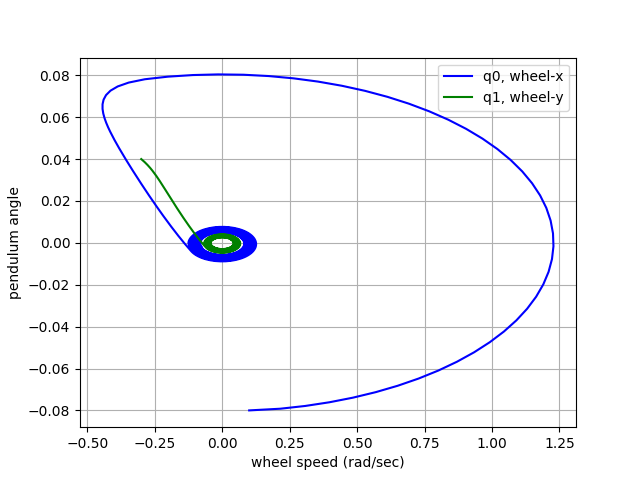
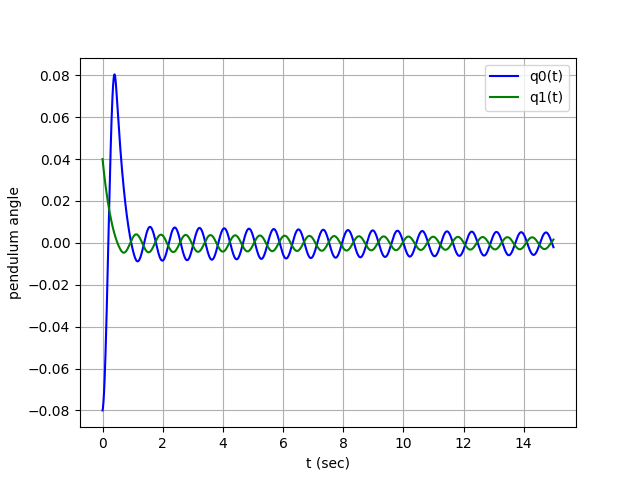
The control algorithm trades off cost (motor power) with performance (time to balanced) to control the inverted pendulum to the upright position. The plots above show a python simulation of the controller at work.